serial.c
シリアルインタフェースドライバ [詳細]
#include <t_services.h>
#include <serial.h>
#include <hw_serial.h>
#include "kernel_id.h"
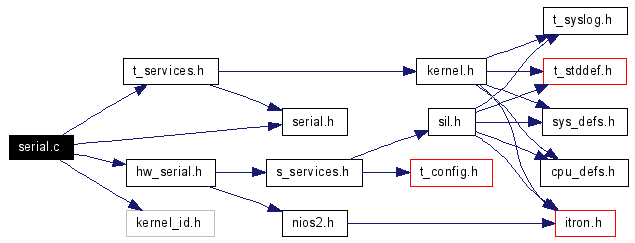
serial.cのインクルード依存関係図
データ構造 | |
| struct | serial_port_initialization_block |
| struct | serial_port_control_block |
マクロ定義 | |
| #define | SERIAL_BUFSZ 256 |
| #define | FC_STOP '\023' |
| #define | FC_START '\021' |
| #define | BUFCNT_STOP (SERIAL_BUFSZ - 64) |
| #define | BUFCNT_START (SERIAL_BUFSZ - 128) |
| #define | MAX_FLUSH_WAIT 1000 |
| #define | INDEX_PORT(portid) ((UINT)((portid) - 1)) |
| #define | get_spcb(portid) (&(spcb_table[INDEX_PORT(portid)])) |
| #define | INC_PTR(ptr) { if (++ptr == SERIAL_BUFSZ) ptr = 0; } |
| ポインタのインクリメント | |
型定義 | |
| typedef serial_port_initialization_block | SPINIB |
| typedef serial_port_control_block | SPCB |
関数 | |
| void | serial_initialize (VP_INT exinf) |
| ER | serial_opn_por (ID portid) |
| ER | serial_cls_por (ID portid) |
| Inline BOOL | serial_snd_chr (SPCB *spcb, char c) |
| static BOOL | serial_wri_chr (SPCB *spcb, char c) |
| ER_UINT | serial_wri_dat (ID portid, char *buf, UINT len) |
| static BOOL | serial_rea_chr (SPCB *spcb, char *c) |
| ER_UINT | serial_rea_dat (ID portid, char *buf, UINT len) |
| ER | serial_ctl_por (ID portid, UINT ioctl) |
| ER | serial_ref_por (ID portid, T_SERIAL_RPOR *pk_rpor) |
| void | sio_ierdy_snd (VP_INT exinf) |
| void | sio_ierdy_rcv (VP_INT exinf) |
変数 | |
| static const SPINIB | spinib_table [TNUM_PORT] |
| static SPCB | spcb_table [TNUM_PORT] |
説明
シリアルインタフェースドライバ
serial.c で定義されています。
マクロ定義
|
|
参照元 serial_rea_chr(). |
|
|
参照元 sio_ierdy_rcv(). |
|
|
|
|
|
参照元 sio_ierdy_rcv(). |
|
|
参照元 serial_cls_por()・serial_ctl_por()・serial_opn_por()・serial_rea_dat()・serial_ref_por()・serial_wri_dat(). |
|
|
ポインタのインクリメント
参照元 serial_rea_chr()・serial_wri_chr()・sio_ierdy_rcv()・sio_ierdy_snd(). |
|
|
|
|
|
|
|
|
|
型定義
|
|
|
|
|
|
関数
|
|
参照先 _syscall・E_CTX・E_ID・E_OBJ・E_OK・FALSE・get_spcb・loc_cpu()・serial_port_control_block::openflag・sio_cls_por()・serial_port_control_block::siopcb・sns_ctx()・TNUM_PORT・unl_cpu(). 00195 { 00196 SPCB *spcb; 00197 ER ercd; 00198 00199 if (sns_ctx()) { /* コンテキストのチェック */ 00200 return(E_CTX); 00201 } 00202 if (!(1 <= portid && portid <= TNUM_PORT)) { 00203 return(E_ID); /* ポート番号のチェック */ 00204 } 00205 spcb = get_spcb(portid); 00206 00207 _syscall(loc_cpu()); 00208 if (!(spcb->openflag)) { /* オープン済みかのチェック */ 00209 ercd = E_OBJ; 00210 } 00211 else { 00212 /* 00213 * ハードウェア依存のクローズ処理 00214 */ 00215 sio_cls_por(spcb->siopcb); 00216 spcb->openflag = FALSE; 00217 ercd = E_OK; 00218 } 00219 _syscall(unl_cpu()); 00220 return(ercd); 00221 }
関数の呼び出しグラフ: 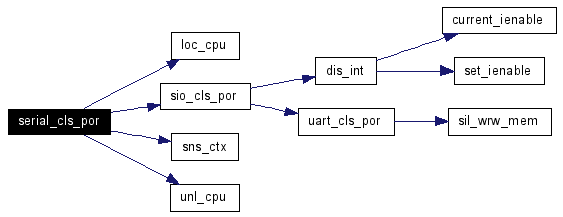 |
|
||||||||||||
|
参照先 E_CTX・E_ID・E_OBJ・E_OK・get_spcb・serial_port_control_block::ioctl・serial_port_control_block::openflag・sns_ctx()・TNUM_PORT. 参照元 main_task(). 00387 { 00388 SPCB *spcb; 00389 00390 if (sns_ctx()) { /* コンテキストのチェック */ 00391 return(E_CTX); 00392 } 00393 if (!(1 <= portid && portid <= TNUM_PORT)) { 00394 return(E_ID); /* ポート番号のチェック */ 00395 } 00396 00397 spcb = get_spcb(portid); 00398 if (!(spcb->openflag)) { /* オープン済みかのチェック */ 00399 return(E_OBJ); 00400 } 00401 00402 spcb->ioctl = ioctl; 00403 return(E_OK); 00404 }
関数の呼び出しグラフ:  |
|
|
参照先 FALSE・serial_port_control_block::openflag・sio_initialize・spcb_table・serial_port_control_block::spinib・spinib_table・TNUM_PORT. 00125 { 00126 SPCB *spcb; 00127 UINT i; 00128 00129 sio_initialize(); 00130 for (spcb = spcb_table, i = 0; i < TNUM_PORT; spcb++, i++) { 00131 spcb->spinib = &(spinib_table[i]); 00132 spcb->openflag = FALSE; 00133 } 00134 }
|
|
|
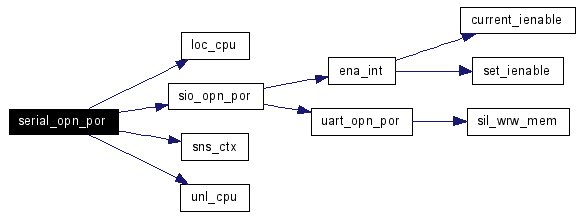
||||||||||||
|
||||||||||||||||
|
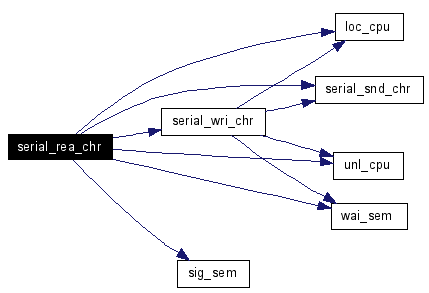
参照先 _syscall・E_CTX・E_ID・E_OBJ・get_spcb・serial_port_control_block::openflag・serial_port_initialization_block::rcv_semid・sns_dpn()・serial_port_control_block::spinib・TNUM_PORT・TRUE・wai_sem(). 参照元 main_task(). 00352 { 00353 SPCB *spcb; 00354 BOOL buffer_empty; 00355 UINT i; 00356 00357 if (sns_dpn()) { /* コンテキストのチェック */ 00358 return(E_CTX); 00359 } 00360 if (!(1 <= portid && portid <= TNUM_PORT)) { 00361 return(E_ID); /* ポート番号のチェック */ 00362 } 00363 00364 spcb = get_spcb(portid); 00365 if (!(spcb->openflag)) { /* オープン済みかのチェック */ 00366 return(E_OBJ); 00367 } 00368 00369 buffer_empty = TRUE; /* ループの1回めは wai_sem する */ 00370 for (i = 0; i < len; i++) { 00371 if (buffer_empty) { 00372 _syscall(wai_sem(spcb->spinib->rcv_semid)); 00373 } 00374 buffer_empty = serial_rea_chr(spcb, buf++); 00375 } 00376 if (!buffer_empty) { 00377 _syscall(sig_sem(spcb->spinib->rcv_semid)); 00378 } 00379 return(len); 00380 }
関数の呼び出しグラフ:  |
|
||||||||||||
|
参照先 E_CTX・E_ID・E_OBJ・E_OK・get_spcb・serial_port_control_block::openflag・serial_port_control_block::rcv_count・T_SERIAL_RPOR::reacnt・serial_port_control_block::snd_count・sns_ctx()・TNUM_PORT・T_SERIAL_RPOR::wricnt. 00411 { 00412 SPCB *spcb; 00413 00414 if (sns_ctx()) { /* コンテキストのチェック */ 00415 return(E_CTX); 00416 } 00417 if (!(1 <= portid && portid <= TNUM_PORT)) { 00418 return(E_ID); /* ポート番号のチェック */ 00419 } 00420 00421 spcb = get_spcb(portid); 00422 if (!(spcb->openflag)) { /* オープン済みかのチェック */ 00423 return(E_OBJ); 00424 } 00425 00426 pk_rpor->reacnt = spcb->rcv_count; 00427 pk_rpor->wricnt = spcb->snd_count; 00428 return(E_OK); 00429 }
関数の呼び出しグラフ:  |
|
||||||||||||
|
参照先 FALSE・sio_ena_cbr・SIO_ERDY_SND・sio_snd_chr・serial_port_control_block::siopcb・TRUE. 参照元 serial_rea_chr()・serial_wri_chr()・sio_ierdy_rcv(). 00228 { 00229 if (sio_snd_chr(spcb->siopcb, c)) { 00230 return(TRUE); 00231 } 00232 else { 00233 sio_ena_cbr(spcb->siopcb, SIO_ERDY_SND); 00234 return(FALSE); 00235 } 00236 }
|
|
||||||||||||
|
参照先 _syscall・FALSE・INC_PTR・serial_port_control_block::ioctl・IOCTL_CRLF・loc_cpu()・SERIAL_BUFSZ・serial_snd_chr()・serial_port_control_block::snd_buffer・serial_port_control_block::snd_count・serial_port_initialization_block::snd_semid・serial_port_control_block::snd_stopped・serial_port_control_block::snd_write_ptr・serial_port_control_block::spinib・unl_cpu()・wai_sem(). 参照元 serial_rea_chr(). 00243 { 00244 BOOL buffer_full; 00245 00246 /* 00247 * LF の前に CR を送信する. 00248 */ 00249 if (c == '\n' && (spcb->ioctl & IOCTL_CRLF) != 0) { 00250 if (serial_wri_chr(spcb, '\r')) { 00251 _syscall(wai_sem(spcb->spinib->snd_semid)); 00252 } 00253 } 00254 00255 _syscall(loc_cpu()); 00256 if (spcb->snd_count == 0 && !(spcb->snd_stopped) 00257 && serial_snd_chr(spcb, c)) { 00258 /* 00259 * シリアルI/Oデバイスの送信レジスタに文字を入れるこ 00260 * とに成功した場合. 00261 */ 00262 buffer_full = FALSE; 00263 } 00264 else { 00265 /* 00266 * 送信バッファに文字を入れる. 00267 */ 00268 spcb->snd_buffer[spcb->snd_write_ptr] = c; 00269 INC_PTR(spcb->snd_write_ptr); 00270 spcb->snd_count++; 00271 buffer_full = (spcb->snd_count == SERIAL_BUFSZ); 00272 } 00273 _syscall(unl_cpu()); 00274 return(buffer_full); 00275 }
関数の呼び出しグラフ:  |
|
||||||||||||||||
|
参照先 _syscall・E_CTX・E_ID・E_OBJ・get_spcb・serial_port_control_block::openflag・serial_port_initialization_block::snd_semid・sns_dpn()・serial_port_control_block::spinib・TNUM_PORT・TRUE・wai_sem(). 参照元 logtask_putc(). 00279 { 00280 SPCB *spcb; 00281 BOOL buffer_full; 00282 UINT i; 00283 00284 if (sns_dpn()) { /* コンテキストのチェック */ 00285 return(E_CTX); 00286 } 00287 if (!(1 <= portid && portid <= TNUM_PORT)) { 00288 return(E_ID); /* ポート番号のチェック */ 00289 } 00290 00291 spcb = get_spcb(portid); 00292 if (!(spcb->openflag)) { /* オープン済みかのチェック */ 00293 return(E_OBJ); 00294 } 00295 00296 buffer_full = TRUE; /* ループの1回めは wai_sem する */ 00297 for (i = 0; i < len; i++) { 00298 if (buffer_full) { 00299 _syscall(wai_sem(spcb->spinib->snd_semid)); 00300 } 00301 buffer_full = serial_wri_chr(spcb, *buf++); 00302 } 00303 if (!buffer_full) { 00304 _syscall(sig_sem(spcb->spinib->snd_semid)); 00305 } 00306 return(len); 00307 }
関数の呼び出しグラフ:  |
|
|

変数
|
|
参照元 serial_initialize(). |
|
|
初期値: {
{ SERIAL_RCV_SEM1, SERIAL_SND_SEM1 }
}
参照元 serial_initialize(). |
Copyright © 2006 by TAKAGI Nobuhisa.
このページは Mon Apr 3 23:49:18 2006 に Doxygen によって生成されました。