wait.c
待ち状態管理モジュール [詳細]
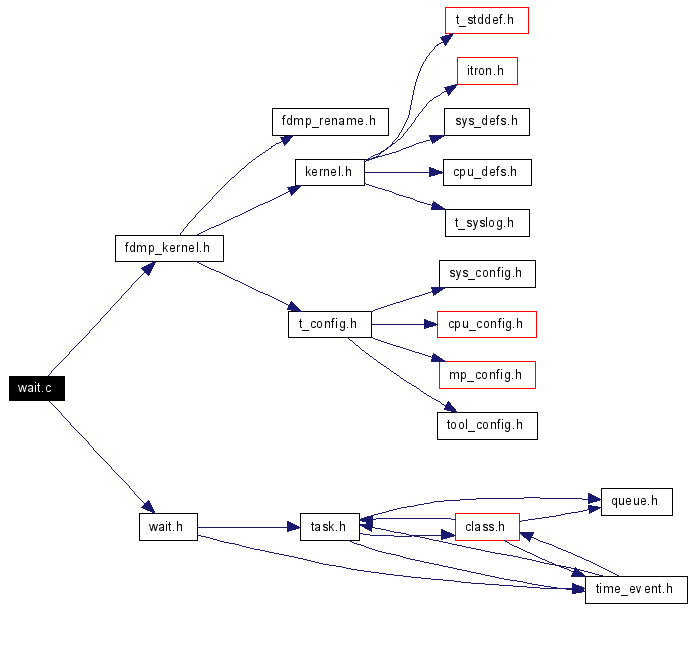
#include "fdmp_kernel.h"
#include "wait.h"
wait.cのインクルード依存関係図
関数 | |
| Inline BOOL | make_non_wait (CCB *ccb, TCB *tcb) |
| 待ち解除のためのタスク状態の更新 | |
| Inline void | queue_insert_tpri (TCB *tcb, QUEUE *queue) |
| タスクの優先度順の待ちキューへの挿入 | |
| Inline void | wobj_queue_insert (WOBJCB *wobjcb) |
| 実行中のタスクの同期・通信オブジェクトの待ちキューへの挿入 | |
説明
待ち状態管理モジュール
wait.c で定義されています。
関数
|
||||||||||||
|
待ち解除のためのタスク状態の更新 tcb で指定されるタスクを,待ち解除するようタスク状態を更新する.待 ち解除するタスクが実行できる状態になる場合は,レディキューにつなぐ. また,ディスパッチが必要な場合には TRUE を返す. 待ち状態を解除する場合は,必ずこの関数を呼び出すため,デットロック 回避のためのペンディングフラグのチェックをまとめて行う. 参照先 task_control_block::actcnt・assert・FALSE・LOG_TSKSTAT・make_active・make_dormant・make_runnable・task_control_block::pend_chgpri・task_control_block::pend_newpri・task_control_block::pend_relwai・task_control_block::pend_tertsk・task_control_block::priority・task_control_block::terflg・TRUE・TS_SUSPENDED・task_control_block::tstat・TSTAT_SUSPENDED・TSTAT_WAITING. 00086 { 00087 assert(TSTAT_WAITING(tcb->tstat)); 00088 00089 /* タスク強制終了保留チェック */ 00090 if (tcb->pend_tertsk) { 00091 /* 00092 * TCBを解放して,terflgをTRUEにする. 00093 * pend_tertskはmake_dormant()でクリアされる 00094 */ 00095 make_dormant(tcb); 00096 tcb->terflg = TRUE; 00097 if (tcb->actcnt) { 00098 tcb->actcnt = FALSE; 00099 if (make_active(ccb, tcb)) { 00100 return(TRUE); 00101 } 00102 } 00103 return(FALSE); 00104 } 00105 00106 /* 優先度変更フラグチェック */ 00107 if (tcb->pend_chgpri) { 00108 tcb->priority = tcb->pend_newpri; 00109 /* 優先度変更フラグのクリア */ 00110 tcb->pend_chgpri = FALSE; 00111 } 00112 00113 /* タスク強制待ち解除保留クリア */ 00114 tcb->pend_relwai = FALSE; 00115 00116 if (!(TSTAT_SUSPENDED(tcb->tstat))) { 00117 /* 00118 * 待ち状態から実行できる状態への遷移 00119 */ 00120 return(make_runnable(ccb, tcb)); 00121 } 00122 else { 00123 /* 00124 * 二重待ち状態から強制待ち状態への遷移 00125 */ 00126 tcb->tstat = TS_SUSPENDED; 00127 LOG_TSKSTAT(tcb); 00128 return(FALSE); 00129 } 00130 }
|
|
||||||||||||
|
タスクの優先度順の待ちキューへの挿入
参照先 entry・queue::next・task_control_block::priority・queue_insert_prev()・task_control_block::task_queue. 参照元 wobj_queue_insert(). 00263 { 00264 QUEUE *entry; 00265 UINT priority = tcb->priority; 00266 00267 for (entry = queue->next; entry != queue; entry = entry->next) { 00268 if (priority < ((TCB *) entry)->priority) { 00269 break; 00270 } 00271 } 00272 queue_insert_prev(entry, &(tcb->task_queue)); 00273 }
関数の呼び出しグラフ:  |
|
|
実行中のタスクの同期・通信オブジェクトの待ちキューへの挿入
参照先 queue_insert_prev()・queue_insert_tpri()・runtsk・TA_TPRI・wait_object_control_block::wait_queue・wait_object_initialization_block::wobjatr・wait_object_control_block::wobjinib. 00281 { 00282 if ((wobjcb->wobjinib->wobjatr & TA_TPRI) != 0) { 00283 queue_insert_tpri(runtsk, &(wobjcb->wait_queue)); 00284 } 00285 else { 00286 queue_insert_prev(&(wobjcb->wait_queue), 00287 &(runtsk->task_queue)); 00288 } 00289 }
関数の呼び出しグラフ:  |
Copyright © 2006 by TAKAGI Nobuhisa.
このページは Mon Apr 3 23:49:19 2006 に Doxygen によって生成されました。